
NODYCON2023 Mini-Keynotes
Mini-Keynotes
Agile, robust, and multifunctional micro-aerial-robots powered by soft artificial muscles
Kevin Chen
Recent advances in microrobotics have demonstrated remarkable locomotive capabilities such as hovering flights, impulsive jumps, and fast running in insect-scale robots.
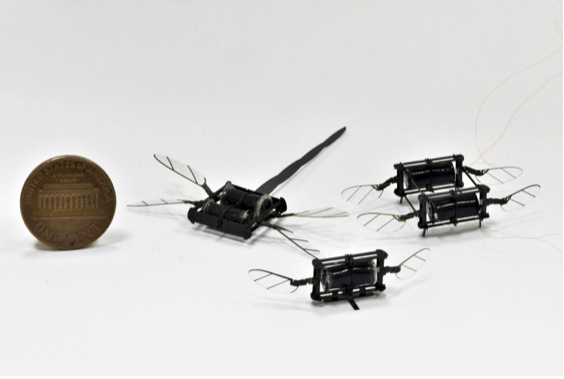 However, most microrobots that are powered by power-dense rigid actuators have not achieved insect-like collision resilience. In this talk, I will present our recent effort in developing a new class of microrobots – ones that are powered by high bandwidth soft actuators and equipped with rigid appendages for effective interactions with environments. Towards improving collision robustness of micro-aerial robots, we develop the first heavier-than-air aerial robot powered by soft artificial muscles that demonstrates a 40-second hovering flight. In addition, our robot can recover from an in-flight collision and perform a somersault within 0.16 seconds. The robot’s maximum lift is comparable to that of the best rigid-powered sub-gram robots. This work demonstrates for the first time that soft aerial robots can achieve agile and robust flight capabilities absent in rigid-powered micro-aerial vehicles, thus showing the potential of a new class of hybrid soft-rigid robots.
However, most microrobots that are powered by power-dense rigid actuators have not achieved insect-like collision resilience. In this talk, I will present our recent effort in developing a new class of microrobots – ones that are powered by high bandwidth soft actuators and equipped with rigid appendages for effective interactions with environments. Towards improving collision robustness of micro-aerial robots, we develop the first heavier-than-air aerial robot powered by soft artificial muscles that demonstrates a 40-second hovering flight. In addition, our robot can recover from an in-flight collision and perform a somersault within 0.16 seconds. The robot’s maximum lift is comparable to that of the best rigid-powered sub-gram robots. This work demonstrates for the first time that soft aerial robots can achieve agile and robust flight capabilities absent in rigid-powered micro-aerial vehicles, thus showing the potential of a new class of hybrid soft-rigid robots.
Bio-sketch of Kevin Chen

Kevin Chen is currently the D. Reid Weedon, Jr. ’41 Career Development Assistant Professor at the Department of Electrical Engineering and Computer Science, MIT, USA. He received his PhD in Engineering Sciences at Harvard University in 2017 and his bachelor’s degree in Applied and Engineering Physics from Cornell University in 2012. His research interests include developing high bandwidth and robust soft actuators for microrobot manipulation and locomotion. He has published in top journals including Nature, Science Robotics, Advanced Materials, PNAS, Nature Communications, IEEE TRO, and Journal of Fluid Mechanics. He is a recipient of the TRO 2021 best paper award, the RAL 2020 best paper award, the IROS 2015 best student paper award, the RAL 2021 Outstanding Associate Editor award, and a Harvard Teaching Excellence Award.
Utilising the Vibro-Impact Self-Propelled Capsule for Lower Gastrointestinal Endoscopies
Yang Liu
Exeter Small-Scale Robotics Laboratory, Engineering Department, University of Exeter, Exeter, UK
E-mail: y.liu2@exeter.ac.uk
Capsule endoscopy has become established as the primary modality for examining the intestinal mucosa. However, its reliance on peristalsis for passage through the intestine causes variable locomotion speeds, which can lead to incomplete visualisation of the mucosa and potentially missed pathology. Also, lengthy videos resulting from long transit times (5-8 hours) can be both time-consuming and burdensome for clinicians to examine. A vibro-impact self-propelled capsule robot was developed by the Exeter Small-Scale Robotics Laboratory at the University of Exeter for lower gastrointestinal (including the small and large intestines) examinations.
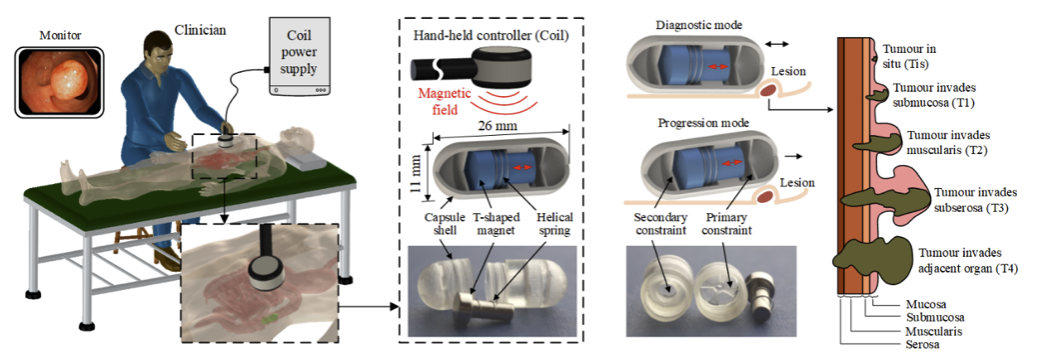 In this talk, I will introduce this research work from the principle, including mathematical modelling, numerical analysis, control and optimisation, experimental investigation, to proof-of-concept validation in an ex vivo intestinal environment. I will particularly focus on studying how nonlinear dynamics could help with the design and control of the robot as well as the diagnosis of early bowel cancer. The driving principle of this technique is that rectilinear motion of the robot can be generated using a periodically driven internal mass interacting with the main body of the robot as a “hammer”, in the presence of intestinal resistances. The robot can perform either forward or backward progression by modulating its excitation amplitude and frequency. Early proof-of-concept tests in a laboratory environment were carried out for different capsule-intestine contact conditions, achieving the maximum forward and backward speeds at 2 mm/s and 1 mm/s, respectively. Assuming a maximum small intestinal length of six metres and capsule speed of just 2 mm/s, small intestinal transit could be reduced to no more than 50 minutes. Compared with the conventional capsule endoscopy, this technique may offer the potential for a “live” and controllable examination.
In this talk, I will introduce this research work from the principle, including mathematical modelling, numerical analysis, control and optimisation, experimental investigation, to proof-of-concept validation in an ex vivo intestinal environment. I will particularly focus on studying how nonlinear dynamics could help with the design and control of the robot as well as the diagnosis of early bowel cancer. The driving principle of this technique is that rectilinear motion of the robot can be generated using a periodically driven internal mass interacting with the main body of the robot as a “hammer”, in the presence of intestinal resistances. The robot can perform either forward or backward progression by modulating its excitation amplitude and frequency. Early proof-of-concept tests in a laboratory environment were carried out for different capsule-intestine contact conditions, achieving the maximum forward and backward speeds at 2 mm/s and 1 mm/s, respectively. Assuming a maximum small intestinal length of six metres and capsule speed of just 2 mm/s, small intestinal transit could be reduced to no more than 50 minutes. Compared with the conventional capsule endoscopy, this technique may offer the potential for a “live” and controllable examination.
Bio-sketch of Yang Liu

Dr Yang Liu is an Associate Professor in Dynamics and Control in Engineering Department at the University of Exeter, Exeter, UK, and an Honorary Lecturer in Endoscopy Department at the Royal Devon University Healthcare NHS Foundation Trust, Exeter, UK. He obtained his B.Eng. degree in Automation from Hunan University, Changsha, China in 2003, M.Sc. degree in Control Systems from the University of Sheffield, Sheffield, UK in 2005, and Ph.D. degree in Control Engineering from Staffordshire University, Stafford, UK in 2010. After joining the University of Exeter in 2016, he has been leading the Exeter Small-Scale Robotics Laboratory working on dynamics and control of non-smooth dynamical systems. He has published more than 90 academic papers including 76 high impact peer-reviewed journal papers, e.g., in Phil. Trans. R. Soc. A, Int. J. Mech. Sci., Nonlinear Dyn., and Commun. Nonlinear Sci., and two patents. His team has been awarded the Lab Science Bursary Award in the 2019 British Society of Gastroenterology Annual Meeting and the Ali H. Hayfeh Prize at the 2nd International Nonlinear Dynamics Conference in 2021.